
Центр Когнитивного Моделирования МФТИ





Центр когнитивного моделирования в Московском физико-техническом институте (МФТИ) включает в себя лабораторию когнитивных динамических систем (рук. А.И. Панов) и лабораторию интеллектуального транспорта НКБ ВС (рук. Д.А. Юдин).
Основной задачей центра является создание универсальных архитектур управления поведением когнитивными агентами. Агенты могут функционировать как в виртуальной среде (симуляторы и игровые среды), так и реальном мире (робототехнические системы), где им необходимо демонстрировать интеллектуальное поведение: планировать поведение, приобретать и использовать знания, взаимодействовать с другими участниками совместной деятельности, распознавать и категоризировать объекты среды, ставить и менять собственные цели и т.д.
Основным результатом работы Центра является как создание теоретических основ построения и работы таких систем управления, так и создание программных комплексов для решения прикладных задач.
- Машинное обучение
- Математическое моделирование
- Нейронные сети
- Обработка естественного языка (NLP)
- Компьютерное зрение (CV)
- Обучение с подкреплением (RL)
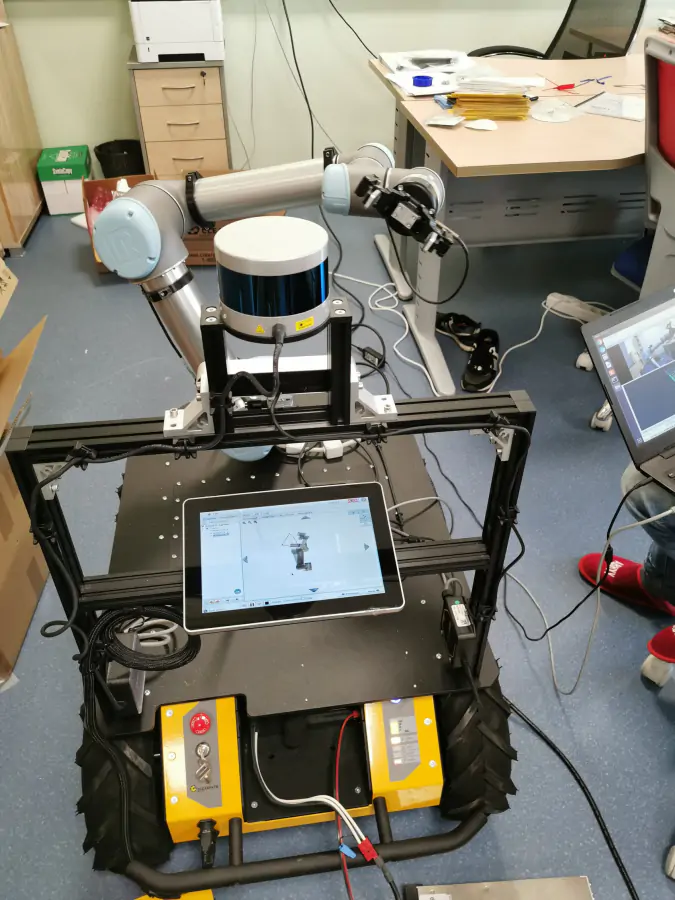
Мобильный робот с манипулятором Husky. Эта платформа производится компанией Clearpath уже несколько лет и является одним из самых надежных и популярных экспериментальных роботов для проведения передовых научно-исследовательских работ в области робототехники и искусственного интеллекта


Топ-100
Области наук
|
2
4
6
8
10
12
14
|
|
|
General Computer Science
|
General Computer Science, 14, 12.96%
General Computer Science
14 публикаций, 12.96%
|
|
Artificial Intelligence
|
Artificial Intelligence, 10, 9.26%
Artificial Intelligence
10 публикаций, 9.26%
|
|
General Engineering
|
General Engineering, 9, 8.33%
General Engineering
9 публикаций, 8.33%
|
|
Software
|
Software, 9, 8.33%
Software
9 публикаций, 8.33%
|
|
Electrical and Electronic Engineering
|
Electrical and Electronic Engineering, 7, 6.48%
Electrical and Electronic Engineering
7 публикаций, 6.48%
|
|
Computer Networks and Communications
|
Computer Networks and Communications, 6, 5.56%
Computer Networks and Communications
6 публикаций, 5.56%
|
|
Control and Systems Engineering
|
Control and Systems Engineering, 6, 5.56%
Control and Systems Engineering
6 публикаций, 5.56%
|
|
General Materials Science
|
General Materials Science, 5, 4.63%
General Materials Science
5 публикаций, 4.63%
|
|
Applied Mathematics
|
Applied Mathematics, 5, 4.63%
Applied Mathematics
5 публикаций, 4.63%
|
|
Cognitive Neuroscience
|
Cognitive Neuroscience, 5, 4.63%
Cognitive Neuroscience
5 публикаций, 4.63%
|
|
Computer Vision and Pattern Recognition
|
Computer Vision and Pattern Recognition, 5, 4.63%
Computer Vision and Pattern Recognition
5 публикаций, 4.63%
|
|
Information Systems
|
Information Systems, 4, 3.7%
Information Systems
4 публикации, 3.7%
|
|
Experimental and Cognitive Psychology
|
Experimental and Cognitive Psychology, 4, 3.7%
Experimental and Cognitive Psychology
4 публикации, 3.7%
|
|
Computer Science Applications
|
Computer Science Applications, 3, 2.78%
Computer Science Applications
3 публикации, 2.78%
|
|
Electronic, Optical and Magnetic Materials
|
Electronic, Optical and Magnetic Materials, 2, 1.85%
Electronic, Optical and Magnetic Materials
2 публикации, 1.85%
|
|
General Mathematics
|
General Mathematics, 2, 1.85%
General Mathematics
2 публикации, 1.85%
|
|
Mechanical Engineering
|
Mechanical Engineering, 2, 1.85%
Mechanical Engineering
2 публикации, 1.85%
|
|
Computational Theory and Mathematics
|
Computational Theory and Mathematics, 2, 1.85%
Computational Theory and Mathematics
2 публикации, 1.85%
|
|
Psychiatry and Mental health
|
Psychiatry and Mental health, 2, 1.85%
Psychiatry and Mental health
2 публикации, 1.85%
|
|
Theoretical Computer Science
|
Theoretical Computer Science, 2, 1.85%
Theoretical Computer Science
2 публикации, 1.85%
|
|
Control and Optimization
|
Control and Optimization, 2, 1.85%
Control and Optimization
2 публикации, 1.85%
|
|
Neuropsychology and Physiological Psychology
|
Neuropsychology and Physiological Psychology, 2, 1.85%
Neuropsychology and Physiological Psychology
2 публикации, 1.85%
|
|
General Medicine
|
General Medicine, 1, 0.93%
General Medicine
1 публикация, 0.93%
|
|
Biomedical Engineering
|
Biomedical Engineering, 1, 0.93%
Biomedical Engineering
1 публикация, 0.93%
|
|
Neurology
|
Neurology, 1, 0.93%
Neurology
1 публикация, 0.93%
|
|
Human-Computer Interaction
|
Human-Computer Interaction, 1, 0.93%
Human-Computer Interaction
1 публикация, 0.93%
|
|
Management Information Systems
|
Management Information Systems, 1, 0.93%
Management Information Systems
1 публикация, 0.93%
|
|
Information Systems and Management
|
Information Systems and Management, 1, 0.93%
Information Systems and Management
1 публикация, 0.93%
|
|
2
4
6
8
10
12
14
|
Журналы








Цитирующие журналы










Цитируемые журналы









Издатели
|
10
20
30
40
50
60
|
|
|
Springer Nature
56 публикаций, 51.85%
|
|
|
Pleiades Publishing
15 публикаций, 13.89%
|
|
|
Institute of Electrical and Electronics Engineers (IEEE)
15 публикаций, 13.89%
|
|
|
Elsevier
12 публикаций, 11.11%
|
|
|
Federal Research Center "Computer Science and Control" of the Russian Academy of Sciences
2 публикации, 1.85%
|
|
|
Association for the Advancement of Artificial Intelligence (AAAI)
2 публикации, 1.85%
|
|
|
Oxford University Press
1 публикация, 0.93%
|
|
|
MDPI
1 публикация, 0.93%
|
|
|
PeerJ
1 публикация, 0.93%
|
|
|
SPIIRAS
1 публикация, 0.93%
|
|
|
Russian State Scientific Center for Robotics and Technical Cybernetics
1 публикация, 0.93%
|
|
|
INSTICC
1 публикация, 0.93%
|
|
|
10
20
30
40
50
60
|
Организации из публикаций
|
10
20
30
40
50
60
70
80
90
|
|
|
Федеральный исследовательский центр "Информатика и управление" РАН
86 публикаций, 79.63%
|
|
|
Московский физико-технический институт
70 публикаций, 64.81%
|
|
|
Институт искусственного интеллекта AIRI
56 публикаций, 51.85%
|
|
|
Национальный исследовательский университет «Высшая школа экономики»
22 публикации, 20.37%
|
|
|
Организация не определена
|
Организация не определена, 10, 9.26%
Организация не определена
10 публикаций, 9.26%
|
|
Московский авиационный институт
4 публикации, 3.7%
|
|
|
Московский государственный технический университет им. Н. Э. Баумана
3 публикации, 2.78%
|
|
|
Технологический университет Лулео
3 публикации, 2.78%
|
|
|
Московский государственный технологический университет «СТАНКИН»
2 публикации, 1.85%
|
|
|
Институт биомедицинской химии имени В.Н. Ореховича
2 публикации, 1.85%
|
|
|
Московский государственный университет имени М.В. Ломоносова
1 публикация, 0.93%
|
|
|
Университет ИТМО
1 публикация, 0.93%
|
|
|
Дальневосточный федеральный университет
1 публикация, 0.93%
|
|
|
Белгородский государственный технологический университет имени В.Г. Шухова
1 публикация, 0.93%
|
|
|
Университет Иннополис
1 публикация, 0.93%
|
|
|
Институт программных систем имени А.К. Айламазяна РАН
1 публикация, 0.93%
|
|
|
ПАО Сбербанк
1 публикация, 0.93%
|
|
|
10
20
30
40
50
60
70
80
90
|












Страны из публикаций
|
10
20
30
40
50
60
70
80
90
100
|
|
|
Россия
|
Россия, 99, 91.67%
Россия
99 публикаций, 91.67%
|
|
Страна не определена
|
Страна не определена, 10, 9.26%
Страна не определена
10 публикаций, 9.26%
|
|
Швеция
|
Швеция, 3, 2.78%
Швеция
3 публикации, 2.78%
|
|
10
20
30
40
50
60
70
80
90
100
|
Цитирующие организации

































































Цитирующие страны
- Мы не учитываем публикации, у которых нет DOI.
- Статистика пересчитывается раз в сутки.
Направления исследований
Соревнование IGLU конференции NeurIPS 2021
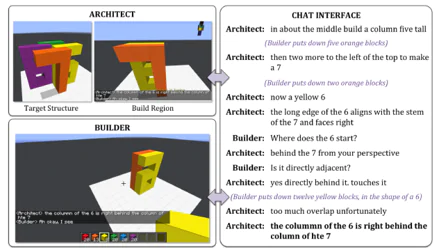
В апреле 2021 года программный комитет ведущей конференции по нейросетевым технологиям в искусственном интеллекте NeurIPS 2021 одобрил заявку международной группы исследователей, куда входят сотрудники Центра когнитивного моделирования МФТИ, Microsoft, Facebook, о проведении соревнования IGLU:Interactive Grounded Language Understanding. Участникам будет предлагаться разработать два типа агентов: строителя и архитектора. Строитель должен уметь в среде Minecraft выполнять языковые инструкции архитектора по постройке различных конфигураций блоков. Архитектор, в свою очередь, должен обучиться эффективно выдавать инструкции. Первый раунд стартует уже в июле 2021 года. В рамках Летней школы Российской ассоциации искусственного интеллекта, которая будет проходить в Сириусе (Сочи), будут организованы туториалы для участников соревнования и отдельный трек для российских участников. Среди призов будут доступ к вычислительным кластерам, памятные призы и возможность представить свои результаты на специальном воркшопе в рамках NeurIPS 2021. Основные правила и даты указаны на сайте соревнования - https://iglu-contest.net.
ForgER: Forgetful Experience Replay for Reinforcement Learning from Demonstrations
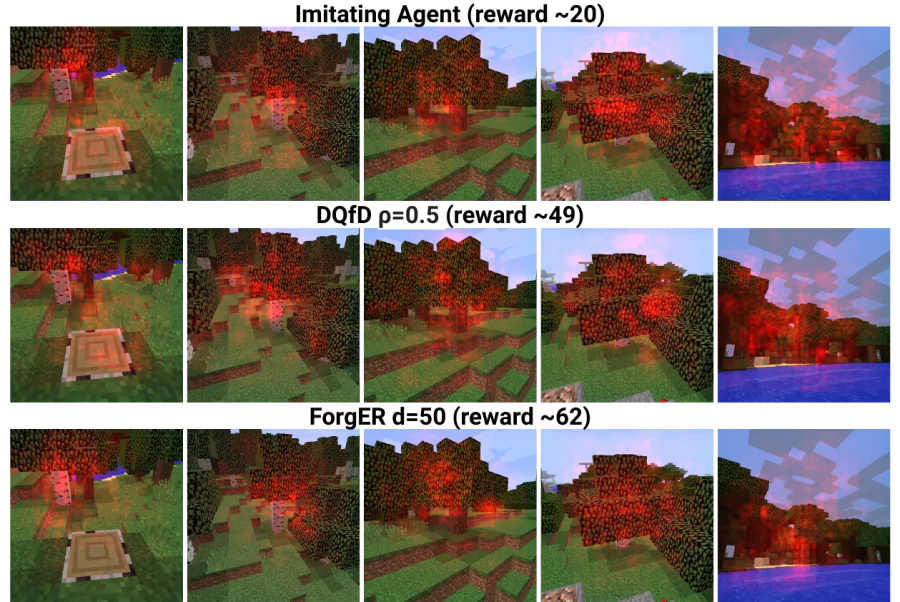
Currently, deep reinforcement learning (RL) shows impressive results in complex gaming and robotic environments. Often these results are achieved at the expense of huge computational costs and require an incredible number of episodes of interaction between the agent and the environment. There are two main approaches to improving the sample efficiency of reinforcement learning methods - using hierarchical methods and expert demonstrations. In this paper, we propose a combination of these approaches that allow the agent to use low-quality demonstrations in complex vision-based environments with multiple related goals. Our forgetful experience replay (ForgER) algorithm effectively handles errors in expert data and reduces quality losses when adapting the action space and states representation to the agent's capabilities. Our proposed goal-oriented structuring of replay buffer allows the agent to automatically highlight sub-goals for solving complex hierarchical tasks in demonstrations. Our method is universal and can be integrated into various off-policy methods. It surpasses all known existing state-of-the-art RL methods using expert demonstrations on various model environments. The solution based on our algorithm beats all the solutions for the famous MineRL competition and allows the agent to mine a diamond in the Minecraft environment.
Робот Husky
В Центр когнитивного моделирования прибыло новое оборудование из Канады - мобильный робот с манипулятором Husky. Эта платформа производится компанией Clearpath уже несколько лет и является одним из самых надежных и популярных экспериментальных роботов для проведения передовых научно-исследовательских работ в области робототехники и искусственного интеллекта. Лаборатории нашего Центра планируют использовать Хаски для тестирования и демонстрации работы наших новых алгоритмов в области картирования, навигации, сегментирования и трекинга объектов, планирования траекторий, обучения с подкреплением. Наши стажеры и сотрудники получили новую современную экспериментальную установку для воплощения своих смелых идей. Благодарим нашего индустриального партнера - компанию Dragon Tree Labs, благодаря которой наш Центр несомненно получит новый импульс в развитии наших работ!
Публикации и патенты

Партнёры




